Теперь в нашем онлайн-магазине доступна уникальная книга «BEAM-робототехника. От азов до создания практических устройств», идеально подходящая как для кружков робототехники, так и для самообучения дома. Вы можете приобрести её по привлекательной цене в 699 рублей. Дополнительная информация о книге доступна на нашем сайте. Также в ассортименте нашего онлайн-магазина представлены готовые наборы для сборки роботов, с помощью которых ваш ребенок сможет легко собрать своего первого робота, следуя нашим подробным инструкциям. Перейти в магазин
- вот так выглядит принципиальная схема проекта - Такой он получился реализованный в железе за исключением одного датчика и модуля блютуз
// // Motor end datchik test //
int val_1 ; // переменная для хранения значения с 1 датчика int val_2 ; // переменная для хранения значения 2 void setup() { Serial.begin(9600); pinMode(8, OUTPUT); // Инициализируем цифровой вход/выход pinMode(9, OUTPUT); // в режим выход pinMode(10, OUTPUT); // для двигателя 1
pinMode(11, OUTPUT); // Инициализируем цифровой вход/выход pinMode(12, OUTPUT); // в режим выход pinMode(13, OUTPUT); // для двигателя 2
pinMode(16, INPUT); // Инициализируем цифровой вход/выход pinMode(15, INPUT); // в режим вход датчиков
void loop() { val_2 = digitalRead(16); // считываем значение с входа датчиков val_3 = digitalRead(15); if ( val_1 == HIGH && val_2 == LOW) // если нажат датчик 1 то платфор-ма едет вперед { //движение вперед digitalWrite(8, LOW); digitalWrite(9, HIGH); digitalWrite(10, HIGH); digitalWrite(11, HIGH); digitalWrite(12, HIGH); digitalWrite(13, LOW);} if ( val_2 == HIGH && val_1 == LOW) // если нажат датчик 2 то платфор-ма едет назад {//движение назад digitalWrite(8, HIGH); digitalWrite(9, LOW); digitalWrite(10, HIGH); digitalWrite(11, HIGH); digitalWrite(12, LOW); digitalWrite(13, HIGH);} else //если датчики не нажаты то платформа стоит на месте {//Стоп digitalWrite(8, LOW); digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); digitalWrite(12, LOW); digitalWrite(13, LOW); } }
вот так выглядит рабочей скетч в котором описаны передние датчики. проверив работоспособность ИК дальномера, не могу добавить его в тело цикла, что бы он например останавливался на заданом расстоянии от препятствия
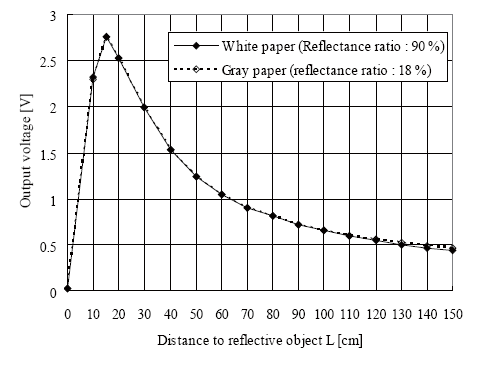
void loop() { // 5V/1024 = 0.0048828125 float volts = analogRead(IRpin)*0.0048828125; // считываем значение сенсора и переводим в напряжение float distance = 65*pow(volts, -1.10); // worked out from graph 65 = theretical distance / (1/Volts)S - luckylarry.co.uk Serial.println(distance); // выдаём в порт delay(100); // ждём }
С помощью данного скетча производил проверку датчика SHARP - GP2Y0A02
Добавлено (23.06.2013, 18:34) --------------------------------------------- Все приведенные скетчи использовались для тестирования, с помощью первого скетча была организована программа управления
проверив работоспособность ИК дальномера, не могу добавить его в тело цикла
Диапазон измерения расстояния от 20 до 150 см ?
Статью думаю вы прочли на крафтдуино. Не получается совместить два кода в один ? А если так:
Код
// // Motor end datchik test //
int IRpin = 0; // свободный аналоговый пин для подключения выхода Vo сенсора int val_1 ; // переменная для хранения значения с 1 датчика int val_2 ; // переменная для хранения значения 2 void setup() { Serial.begin(9600); pinMode(8, OUTPUT); // Инициализируем цифровой вход/выход pinMode(9, OUTPUT); // в режим выход pinMode(10, OUTPUT); // для двигателя 1
pinMode(11, OUTPUT); // Инициализируем цифровой вход/выход pinMode(12, OUTPUT); // в режим выход pinMode(13, OUTPUT); // для двигателя 2
pinMode(16, INPUT); // Инициализируем цифровой вход/выход pinMode(15, INPUT); // в режим вход датчиков
void loop() {
float volts = analogRead(IRpin)*0.0048828125; // считываем значение сенсора и переводим в напряжение float distance = 65*pow(volts, -1.10); //Зная теперь расстояние, занесенное в переменную distance, можем оперировать //с условиями поведения робота в зависимости от дистанции.
val_2 = digitalRead(16); // считываем значение с входа датчиков val_3 = digitalRead(15);
if (distance >= "расстояние указать") { ...Вставить код при котором робот должен работать при отсутствии препятствия }
if (distance <= "расстояние указать) { ...Вставить код при котором робот должен работать при наличии препятствия }
}
Вырезанный код который надо куда-то вставить из условий
Код
if ( val_1 == HIGH && val_2 == LOW) // если нажат датчик 1 то платфор-ма едет вперед { //движение вперед digitalWrite(8, LOW); digitalWrite(9, HIGH); digitalWrite(10, HIGH); digitalWrite(11, HIGH); digitalWrite(12, HIGH); digitalWrite(13, LOW);} if ( val_2 == HIGH && val_1 == LOW) // если нажат датчик 2 то платфор-ма едет назад {//движение назад digitalWrite(8, HIGH); digitalWrite(9, LOW); digitalWrite(10, HIGH); digitalWrite(11, HIGH); digitalWrite(12, LOW); digitalWrite(13, HIGH);} else //если датчики не нажаты то платформа стоит на месте {//Стоп digitalWrite(8, LOW); digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); digitalWrite(12, LOW); digitalWrite(13, LOW); } }
Если не понятно как работает дальномер и какие показания ему скармливать, точнее что ожидать от него, можно просто напросто взять сигнал пустить на аналоговый порт, и вывести значение порта в serialRead(Пин на который подключен дальномер); и наглядно увидим сколько он показывает при максимальной дистанции, и при минимальной. После найдем середину, ну а там не сложно прикинуть расстояние. Так еще проще.
int IRpin = 0; // свободный аналоговый пин для подключения выхода Vo сенсора int val_1 ; // переменная для хранения значения с 1 датчика int val_2 ; // переменная для хранения значения 2 void setup() { Serial.begin(9600); pinMode(8, OUTPUT); // Инициализируем цифровой вход/выход pinMode(9, OUTPUT); // в режим выход pinMode(10, OUTPUT); // для двигателя 1
pinMode(11, OUTPUT); // Инициализируем цифровой вход/выход pinMode(12, OUTPUT); // в режим выход pinMode(13, OUTPUT); // для двигателя 2
pinMode(16, INPUT); // Инициализируем цифровой вход/выход pinMode(15, INPUT); // в режим вход датчиков
delay(5000); }
void loop() { float volts = analogRead(IRpin)*0.0048828125; // считываем значение сенсора и переводим в напряжение float distance = 65*pow(volts, -1.10); //Зная теперь расстояние, занесенное в переменную distance, можем оперировать //с условиями поведения робота в зависимости от дистанции. Serial.println(distance); delay(500); val_1 = digitalRead(16); // считываем значение с входа датчиков val_2 = digitalRead(15);
if (distance <= 50) { Serial.println(distance); delay(1000); //движение назад digitalWrite(8, HIGH); digitalWrite(9, LOW); digitalWrite(10, HIGH); digitalWrite(11, HIGH); digitalWrite(12, LOW); digitalWrite(13, HIGH);} if (distance >= 50) { Serial.println(distance); delay(1000); //движение назад digitalWrite(8, LOW); digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); digitalWrite(12, LOW); digitalWrite(13, LOW);}} Используя данный скетч был выявлен еще один недостаток платформы 4WD Mr.basic это её инерционность
Код работает ? Инерционность можно гасить программно, для этого нам нужно мотор стопорить. Точно не скажу как это скажется на электронике, но чтобы остановиться резко, а у вас там редуктор тем более, он сразу шестерни не затормозит, на мгновение запускаем мотор в реверс. Или ставим по 1 и 1 на входы L293D(если не ошибаюс это стоп, надо смотреть таблицу истинности)
С инерционностью можно побороться. На небольшое маленькое время реверсировать моторы. Так на сумо лечил его инерцию) а то летит на большой скорости, видит край ринга, и улетает по инерции) Или есть вариант плавно тормозить, используя цикл for.
Добавлено (23.06.2013, 21:16) --------------------------------------------- 1 и 1 на выходах L293D это не стоп. Полного стопа у нее нет как токового) просто 1 и 1 на выходах не будет подавать на моторы ничего.
Так же натыкался на плавный пуск через l293 то что постепенно наращивается входное напряжение, следовательно можно наверно и заставить работать двигатель на пониженном напряжении, но учесть что нагрузка должна стать меньше
Кстати, чтобы не давать роботу заезжать в слепую зону, ведь если препятствие ближе 20 см, то он его не заметит и будет пытать проехать по нему, если оно попало мимо контактов, нужно сделать усы из проволоки, как пример:э
Только усы сделать чтоб они рядом начинали и расходились, и если препятствие будет ниже датчика, или ближе, промельнув мимо дальномера, обязательно заденит тактильный ус.
А вот еще один скетч с использованием всего что нацеплено, и подбором оптимального расстояния // Motor end datchik //
int IRpin = 0; // свободный аналоговый пин для подключения выхода Vo сенсора int val_1 ; // переменная для хранения значения с 1 датчика int val_2 ; // переменная для хранения значения 2 void setup() { Serial.begin(9600); pinMode(8, OUTPUT); // Инициализируем цифровой вход/выход pinMode(9, OUTPUT); // в режим выход pinMode(10, OUTPUT); // для двигателя 1
pinMode(11, OUTPUT); // Инициализируем цифровой вход/выход pinMode(12, OUTPUT); // в режим выход pinMode(13, OUTPUT); // для двигателя 2
pinMode(16, INPUT); // Инициализируем цифровой вход/выход pinMode(15, INPUT); // в режим вход датчиков
delay(5000); }
void loop() { float volts = analogRead(IRpin)*0.0048828125; // считываем значение сенсора и переводим в напряжение float distance = 65*pow(volts, -1.10); //Зная теперь расстояние, занесенное в переменную distance, можем оперировать //с условиями поведения робота в зависимости от дистанции. Serial.println(distance); delay(500); val_1 = digitalRead(16); // считываем значение с входа датчиков val_2 = digitalRead(15);
Добавлено (23.06.2013, 22:40) --------------------------------------------- На счет усов знаю, просто не задавался на счет их реализации, а изготовить их можно в виде бампера
Общайтесь с друзьями в нашем Online-чате по робототехнике
Мы рады, что в России открывается все больше кружков по робототехнике и мы стараемся прикладывать к этому свои усилия начиная с 2008 года :) Мы будем очень рады видеть в чате живое общение, обмен опытом между учащимися в робототехнике и просто увлеченными в этом направлении людей. Мы всегда онлайн, приходите, спрашивайте, помогайте другим - давайте сделаем Мир чуточку лучше!
Чтобы не потерять чат и быть всегда с нами на связи - откройте окно чата в новом окне браузера и добавьте его в заколадки. Открыть в новом окне